 HeartToHeart_V1R2 と言うアイコンをダブルクリックすると、COM1 を通じて「まなぶ君」を操作できる様になります。
HeartToHeart_V1R2 と言うアイコンをダブルクリックすると、COM1 を通じて「まなぶ君」を操作できる様になります。各サーボが、CH1~24(まなぶ君は17個のサーボ)へ割り当てられていて、中立(90度)から
角度を自由に決定できる仕組みです。
そんな事もあり、今日はソフトの説明を・・・
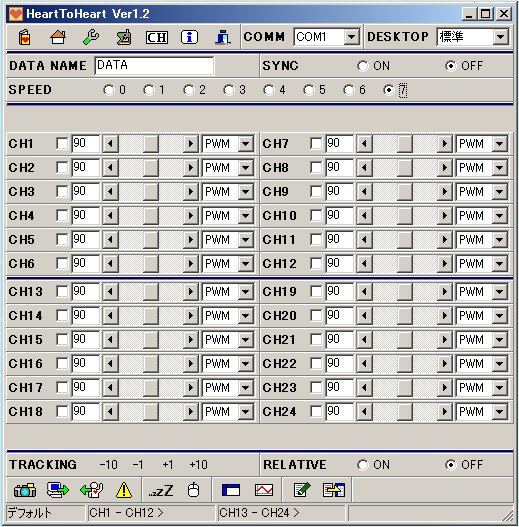
HeartToHeart_V1R2 と言うアイコンをダブルクリックすると、COM1 を通じて「まなぶ君」を操作できる様になります。
各サーボが、CH1~24(まなぶ君は17個のサーボ)へ割り当てられていて、中立(90度)から
角度を自由に決定できる仕組みです。
動作を「モーション」と言う、画面で時系列で「動きと掛ける時間」を設定して、一連の動作を作ります。
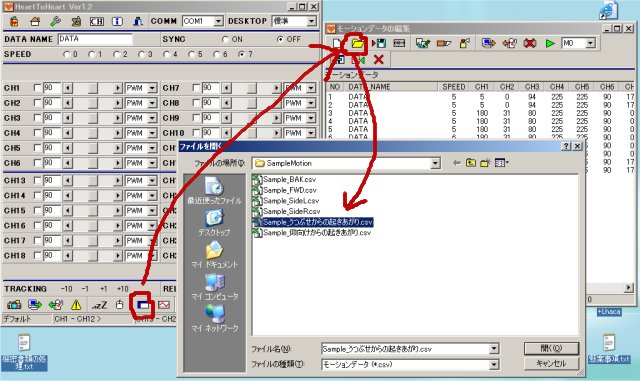
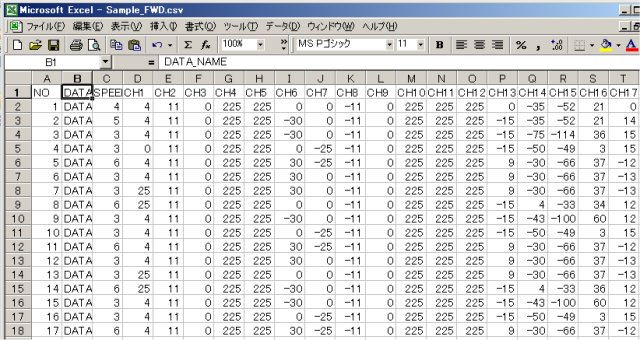
サンプルファイルがあるので、それを参考に、数値を書き込みますが、このデータは、エクセルの CSV関数として記述されていて、ロボットのホームポジション(立っている状態)に対する相対数値として、記述されています。
ソフトには、「教示機能」と言うものがあり、各サーボの電源を個別に切って、手で自由に位置を決めて、そのサーボの角度をデータとして吸い上げる、機能です。
一連の決まった動作(起き上がる・歩くなど)を「モーション」として記憶して(39個まで)それらを組み合わせて、4パターンまで記憶でき・複合動作が可能となります。
また、PCからリモコン操作で、直接・手足を動かす事も出来ます。